Sistema de teleentrenamiento para robótica quirúrgica
Se trata de una interfaz háptica que se conecta a través de la red y permite la manipulación de un robot en otro escenario para realizar ejercicios de entrenamiento básico en este tipo de procedimientos clínicos.

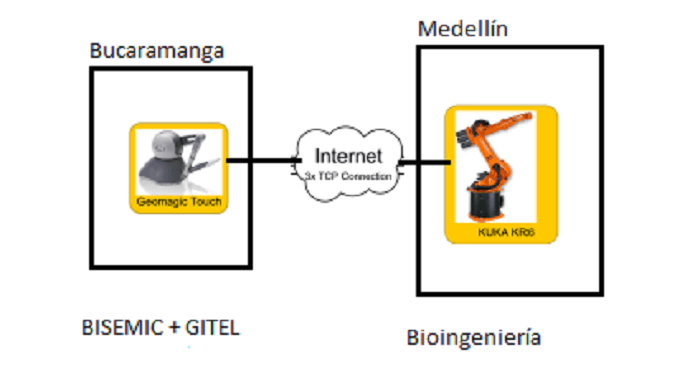
El sistema fue concebido en un proyecto entre UPB Medellín y UPB Bucaramanga, que se compone de dos subsistemas, el sistema maestro y el sistema esclavo, el primero de ellos se trabajó en Bucaramanga y el esclavo, en Medellín. Se llama maestro porque es el que manda el comando hacia el esclavo y este lo ejecuta. El maestro termina siendo la interfaz háptica que tenemos en Bucaramanga, que se conecta a través de la red, esos datos van a Medellín y allí llegan al robot KUKA que es el esclavo que ejecuta la tarea… Al final lo que se tiene es una interfaz háptica conectada a un computador y un video que muestra lo que dicho esclavo está haciendo en Medellín, manifestó el Ingeniero Sergio Alexander Salinas, investigador UPB, Magíster en Electrónica y Telecomunicaciones en el área de robótica.
En la actualidad los entrenamientos se hacen en un centro de simulación, es decir, los estudiantes y cirujanos tienen que desplazarse para realizar su práctica con un tiempo limitado. El nuevo sistema permite que se puedan efectuar desde otros lugares, evitando el desplazamiento hasta el centro especializado.

Jhon Jairo Padilla, Doctor en ingeniería telemática y responsable de la fase de telecomunicaciones del proyecto, explicó que las pruebas se llevaron a cabo con un robot de la UPB Medellín “KUKA”, que recibía órdenes de manera remota desde Bucaramanga, por medio de la Interfaz Háptica y que movía una pinza adaptada por los investigadores, es decir imitaba los movimientos del estudiante que manipulaba la palanca. El monitoreo se realizó con una cámara ubicada en su parte frontal, que permitía grabar y visualizar lo que hacía KUKA.
Al grupo de Investigadores también se unen los Doctores Vera Pérez y Manuel Betancur de la UPB Medellín, quienes trabajaron de forma conjunta con Bucaramanga para lograr la efectividad del Sistema.
Avances para Cirugía laparoscopia con puerto único
Como beneficio adjunto, desde Bucaramanga se trabaja el diseño del sistema para realizar entrenamientos en laparoscopia con puerto único, que es un poco más compleja a nivel técnico. Por ahora, aunque los avances están centrados en robots para entrenamiento, se piensa a futuro, usar en animales, posteriormente en humanos y ampliar la posibilidad de contar con este tipo de tecnología en Colombia.
Por: Ginette Rocío Moreno Cañas - Divulgación Científica. Agencia de Noticias UPB - Bucaramanga